Qué es un microcontrolador
1. Introducción general
Un microcontrolador (μC) es básicamente un pequeño sistema computacional integrado dentro de una sola unidad. Aunque a menudo se lo describe como una “computadora en miniatura", existen varias diferencias respecto a una computadora convencional (ver tabla más abajo). A diferencia de un microprocesador, que necesita componentes externos para formar un sistema completo, el microcontrolador integra todo lo esencial —CPU, memoria y periféricos— en un solo chip encapsulado.
| Característica | Microcontrolador | Computadora (PC) |
|---|---|---|
| Propósito | Tareas específicas y repetitivas | Uso general (ofimática, juegos, etc.) |
| Componentes | CPU, Memoria, Periféricos integrados en un mismo chip | CPU, Memoria, Discos, Periféricos separados individualmente |
| Consumo de energia | Muy bajo | Alto |
| Sistema operativo | No utiliza o utiliza uno muy ligero (RTOS) | Utiliza uno completo (Windows, Linux, etc.) |
Los microcontroladores se utilizan en una amplia variedad de aparatos electrónicos, aplicaciones de domótica y robótica, así como en sistemas embebidos: desde un simple termómetro digital hasta un controlador de encendido en un automóvil.
2. Arquitectura básica de un microcontrolador
Generalmente, un microcontrolador integra internamente cuatro componentes esenciales para su funcionamiento:
- Unidad Central de Procesamiento (CPU): es el “cerebro” del microcontrolador que ejecuta las instrucciones del programa (escritas en lenguajes como C o Assembler).
- Memorias: Flash/ROM para almacenar el programa (firmware), RAM para guardar variables temporales, y EEPROM (en algunos casos) para configuraciones permanentes.
- Periféricos: que permiten la comunicación con el entorno exterior. Entre ellos se encuentran temporizadores, puertos GPIO, convertidores ADC, interfaces UART, I²C, SPI, etc.
- Buses: líneas eléctricas de interconexión entre los distintos módulos internos del microcontrolador, que permiten el intercambio de datos, direcciones y señales de control.
Los periféricos, a su vez, están representados por varios módulos internos específicos. En la figura siguiente se muestra un diagrama de bloques simplificado del Microcontrolador 8051, donde se pueden identificar los principales módulos internos interconectados con la CPU y las memorias RAM y ROM.

En la figura 2.1 se observa cómo todos los módulos del microcontrolador están interconectados mediante buses. Gracias al trabajo conjunto de estos módulos, el microcontrolador puede procesar datos, generar información y comunicarse con su entorno.
3. Cómo funcionan y se programan en la práctica
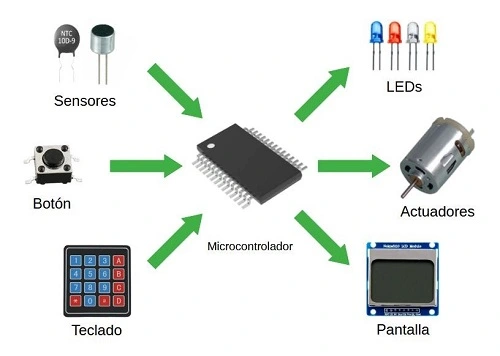
Un microcontrolador puede interactuar con otros dispositivos periféricos externos a través de sus pines de conexión. Sin embargo, para que funcione correctamente, primero debe ser programado; es decir, se le deben cargar instrucciones escritas en un lenguaje de programación, tales como:
- Assembler
- C
- MicroPython
- Basic
- Otros lenguajes
Estas instrucciones se almacenan en su memoria de programa (Flash o ROM) y le indican cómo debe reaccionar durante interacciones externas. Gracias a esa característica programable, los microcontroladores pueden adaptarse a casi cualquier aplicación. Por ejemplo, se puede conectar un sensor de temperatura al microcontrolador y programarlo para activar un ventilador cuando se detecte cierta temperatura.
Ahora bien, para programar un microcontrolador se requieren ciertas herramientas y acciones, como las que se describen en los apartados siguientes.
Herramientas de desarrollo
Actualmente, los programas que se cargan al microcontrolador se desarrollan mediante una plataforma de software, denominada entorno de desarrollo integrado (IDE), por ejemplo:
- Keil
- MPLAB
- STM32CubeIDE
El programa una vez compilado se convierte en un archivo binario (firmware), y luego este archivo debe ser cargado al microcontrolador a través de un dispositivo programador con interfaz (SWD, ISP, ICSP, etc.).
Compilación, carga y ejecución del programa
Antes de cargar el programa al microcontrolador, los IDE requieren que se especifique el modelo exacto del microcontrolador que se vaya a utilizar. Esto se debe a que cada microcontrolador tiene arquitecturas diferentes, periféricos distintos, y un conjunto de instrucciones (instruction set) único. Por lo tanto, el IDE necesita esta información para compilar correctamente el programa y generar el binario que se cargará en el chip.
Una vez programado, el microcontrolador podrá leer el programa desde su memoria Flash y ejecutarlo línea por línea. Normalmente, el microcontrolador suele operar dentro de un bucle principal, leyendo entradas, procesando datos y realizando acciones continuamente mientras esté encendido.
4. Microcontroladores y su evolución histórica
Los microcontroladores han evolucionado desde simples chips integrados hasta sistemas embebidos potentes. Muchos tipos se hicieron populares en distintos momentos gracias a sus características técnicas y la disponibilidad comercial. A continuación se presentan los hitos más relevantes en la evolución de los microcontroladores, junto con referencias populares que marcaron cada época.
Década de 1970 — primeros microcontroladores
8048 (Intel, 1976) — Uno de los primeros microcontroladores comerciales que integran CPU, memoria y periféricos en un solo chip, sentando las bases de los sistemas embebidos modernos.
Década de 1980 — la era del 8051 y los PICs
8051 (Intel, 1980) — Diseñado originalmente por Intel. Su arquitectura fue licenciada a
varios fabricantes (Atmel, NXP, Silicon Labs, STMicroelectronics, etc.). Un ejemplo de variante compatible:
AT89C51.
PIC (Microchip, finales de los 80) — La familia PIC16C marcó el auge de los microcontroladores de propósito general. Un ejemplo representativo es el PIC16C84, uno de los primeros en incorporar memoria EEPROM
reprogramable, ampliamente usado en aplicaciones de control.
Década de 1990 — nacimiento de la arquitectura AVR
AVR (Atmel, 1996) introdujo una arquitectura RISC eficiente. Ejemplo de la primera
generación: AT90S8515, que supuso un avance en rendimiento y facilidad de programación.
Décadas de los 2000 — consolidación y microcontroladores modernos
ATmega8 (Atmel, 2001) — Segunda generación AVR con más memoria y periféricos integrados, ampliamente utilizado en el ámbito educativo y de experimentación.
STM32F103 (STMicroelectronics, 2007) — Basado en la arquitectura ARM Cortex-M3, marcó la
transición hacia microcontroladores de 32 bits, con gran acogida en aplicaciones IoT, robótica y automatización.
Educación y hobby (a partir de 2005) — Los microcontroladores comenzaron a integrarse en
placas de desarrollo orientadas al aprendizaje y al prototipado rápido. Ejemplos notables incluyen
plataformas como Arduino, STM32 y ESP8266, que marcaron el inicio de una nueva
etapa en la difusión de los sistemas embebidos.
Toda esta evolución de los microcontroladores demuestra cómo la integración, la eficiencia y la facilidad de programación impulsaron el desarrollo de los sistemas embebidos modernos.
5. Conclusiones
En resumidas palabras, un microcontrolador permite combinar hardware y software para realizar tareas automáticas y controladas. Su versatilidad los ha convertido en el núcleo de la automatización moderna, y conocerlos a fondo —junto con aprender a programarlos— es el primer paso para comprender cómo funciona la electrónica inteligente que nos rodea.
Comprender la evolución histórica y conocer ejemplos concretos permite relacionar características técnicas con el contexto de su aparición y entender por qué ciertas familias de microcontroladores siguen vigentes.